MEMSźėźĖź═ź╣ż¼╣ŌĮĖ└č╚ŠŲ│öüż╚Ų▒żĖźĘź╣źŲźÓ╗žĖ■żž
MEMSźėźĖź═ź╣ż¼╚ŠŲ│öüźėźĖź═ź╣ż╦ŖZż┼żżżŲżŁżĮż”ż└ĪŻMEMSź╗ź¾źĄż“╠Jż═żļ─ŃŠ├õJ┼┼╬üż╬▒ķōQźĻź├ź┴ż╩SoC(ź╗ź¾źĄźŽźųżóżļżżżŽź╗ź¾źĄźšźÕĪ╝źĖźńź¾)Īóźóźļź┤źĻź║źÓ│½╚»ĪóMEMSż╬źšźĪźųźņź╣Īó│½╚»ź─Ī╝źļż╩ż╔ĪóMEMSźėźĖź═ź╣żŽ╣Łż¼żĻż¼ĮążŲżŁż┐ĪŻ5ĘŅ11-12Ų³Īó┼ņ»B╬Š╣±żŪ│½╠¢żĄżņż┐MEF (MEMS Engineer Forum) 2016żŪżŽMEMSź╗ź¾źĄż╦żŽŗēäż½żķźĘź╣źŲźÓżžż╚╩čż’żĻż─ż─żóżļż│ż╚ż¼żŽż├żŁżĻżĘż┐ĪŻ

┐▐1ĪĪMEF 2016ż╬µ£Ę╩ĪĪĮąųZĪ¦MEMS Engineer Forum 2016
ĄĪ│Ż┼¬ż╩▒┐Ų░ż“źĘźĻź│ź¾æųż╬Ū÷╦ņż╦Ęeż┐ż╗ż┐«ĆŠ«Ę┐ź╗ź¾źĄżŪżóżļĪóMEMSźŪźąźżź╣żŽż│żņż▐żŪ░Ą╬üżõ▓├Å]┼┘Īó│čÅ]┼┘(źĖźŃźżźĒ)Īó╝¦Ążż╩ż╔ż“ĖĪĮążĘżŲżŁż┐ĪŻŪ÷╦ņż¼ĄĪ│Ż┼¬ż╦ĮjżŁż»Ų░ż▒żąŲ░ż»ż█ż╔┤Č┼┘żŽ╣Ōż▐żļż┐żßĪóĮjżŁż»Ų░ż▒żļżĶż”ż╦ȧžÜż“źĘźĻź│ź¾ź©ź├ź┴ź¾ź░ż╩ż╔żŪĘ┴└«ż╣żļĪŻØÖŠ’ż╦┐╝żżź©ź├ź┴ź¾ź░ż“ØŁ═ūż╚ż╣żļźūźĒź╗ź╣żŽĪóźūźņĪ╝ź╩Č\Įčż¼╝ńöüż╬źĘźĻź│ź¾LSIż½żķĖ½żļż╚ØŖÖzż╩×æļ]Č\Įčż└ż├ż┐ĪŻ
ż╚ż│żĒż¼ĪóźĘźĻź│ź¾ICżŪżŌ╣ŌĮĖ└čż╬ź┴ź├źūżŪżŽ┐╝ż»żŲźóź╣ź┌ź»ź╚╚µż╬╣Ōżżź©ź├ź┴ź¾ź░ż¼╗╚ż’żņżļżĶż”ż╦ż╩żĻĪóMEMSČ\Įčż╚ż╬Č”─╠┼└żŌ¾Hż»ż╩ż├żŲżŁż┐ĪŻ×æļ]Č\Įčż└ż▒żŪżŽż╩żżĪŻź╗ź¾źĄżŽĄĪ│Ż┼¬ż╩Ų░żŁż“┼┼╬«żõ┼┼░Ąż╩ż╔ż╦╩č┤╣ż╣żļźŪźąźżź╣żŪżóżļż┐żßĪó┼┼╬«Ī”┼┼░Ąż╬źčźļź╣āSĘ┴ż“┴T╠Żż┼ż▒ż╣żļØŁ═ūż¼żóż├ż┐ĪŻ
╬Ńż©żąĪóź╣ź▐Ī╝ź╚źšź®ź¾ż╬▓ĶĀCż“ŖAżßż½żķ▓Żż╦Ė■żŁż“╩čż©żļż╚▓ĶĀCż╬Ė■żŁżŌ▐kĮ’ż╦╩čż’żļż╚żżż”ĄĪē”ż¼żóżļż¼Īóż│żņżŽĪó×l─ŠöĄĖ■ż╬▓├Å]┼┘ż¼Š’ż╦Ų»ż»─_╬ü▓├Å]┼┘ż¼9.8m/s^2ż╚żżż”▐k─Ļż╬├═ż╩ż╬ż╦Īóź╣ź▐ź█ż╬▓ĶĀCż“ŖAżßż╦ż╣żļż╚ĪóżĮż╬Ė■żŁż¼╩čż’żļż│ż╚ż“ĖĪĮąż╣żļż│ż╚żŪĪóź╣ź▐ź█ż╬▓ĶĀCż“āeż½żķ▓Żżž╩č┤╣ż╣żļż╚żżż”║ŅČ╚ż“╣įż├żŲżżżļĪŻż╣ż╩ż’ż┴Īóź╗ź¾źĄż½żķż╬┼┼Ąż┐«ęÄāSĘ┴ż╬┴T╠Żż“Ų╔ż▀ŲDżļż│ż╚żŪĪó▓Ķ楿“90┼┘öv┼ŠżĄż╗żŲżżżļĪŻ
ź╗ź¾źĄż½żķż╬┐«ęÄāSĘ┴ż╬┴T╠Żż╣żļżŌż╬ż“ŲDżĻĮążĘżŲĪóĄĪē”ż╦╩č┤╣ż╣żļ║ŅČ╚ż¼ØŁ═ūż╩ż╬żŪżóżļĪŻżĮż╬ż┐żßż╬źóźļź┤źĻź║źÓ│½╚»ż¼ź╗ź¾źĄż╦żŽ’Lż½ż╗ż╩żżĪŻź╣ź▐ź█żŽź╗ź¾źĄż╬ōĮż╦ż╩żĻż─ż─żóżļĪŻ╚µ│ė┼¬┐ʿʿżĄĪē”żŪżŽĪó░Ą╬üź╗ź¾źĄż“ŠW├ōżĘżŲĄż░Ąż“▒R─ĻżĘĪóĄż░Ąż¼Ū÷ż»ż╩żļż╚╣Ō┼┘ż¼╣Ōż»ż╩żļż╚żżż”├ŽĄÕż╬ر═²ØŖ└Łż“ŠW├ōżĘżŲ╣Ō┼┘ż“▒R─ĻżŪżŁżļĪŻGPSż╚┴╚ż▀╣ńż’ż╗żņżą║Ż2│¼ż╦żżżļż╬ż½3│¼ż╦żżżļż╬ż½żĄż©Īó╚ĮéāżŪżŁżļż█ż╔╣Ō╗@┼┘ż╦ż╩ż├żŲżżżļĪŻ
╚ŠŲ│öüż╬ĮĖ└č┼┘ż¼æųż¼żļż╚Č”ż╦ĪóźĘź╣źŲźÓ┼¬ż╦ż╩ż├żŲżżż├ż┐ż╬ż╚Ų▒══ż╦ĪóMEMSź╗ź¾źĄżŌźóźļź┤źĻź║źÓż╩ż╔ż╬źĮźšź╚ź”ź©źó│½╚»ż¼’Lż½ż╗ż╩żżźĘź╣źŲźÓ┼¬ż╦ż╩żĻż─ż─żóżļĪŻMEF 2016żŪżŽĪóMEMSź╗ź¾źĄ└ņ╠ńźßĪ╝ź½Ī╝ż╬InvenSenseż¼źšźĪźųźņź╣ļxĖ└żĘż┐ĪŻMEMSź╗ź¾źĄż╚A-D╩č┤╣żõźóźļź┤źĻź║źÓż“┤▐żßż┐┐«ęÄĮĶ═²ż╬CMOSICż“TSMCż¼×æļ]żĘĪóźĮĪ╝źŲźŻź¾ź░ż“InvenSenseż¼ż¬ż│ż╩żżĪóźčź├ź▒Ī╝źĖź¾ź░żŽASEż╩ż╔ż╬OSATż╦░══ĻżĘĪó║ŪĮ¬ż╬źŲź╣ź╚ż“InvenSenseż¼░Ęż”ĪŻInvenSenseżŽMEMSż╚CMOSICż╬└▀╝Ŗż└ż▒ż“╣įż”źšźĪźųźņź╣ż╚ż╩ż├ż┐ĪŻ
żĄżķż╦źĮźšź╚ź”ź©źóĪóźóźļź┤źĻź║źÓż╬│½╚»ź─Ī╝źļ(źūźķź├ź╚źšź®Ī╝źÓ)ĪóSensorStudio(┐▐2)żŌźĻźĻĪ╝ź╣żĘż┐ĪŻż│ż╬źūźķź├ź╚źšź®Ī╝źÓżŪż╬┤╦▄┼¬ż╩ĄĪē”żŽĪóŲŌē┼ż╬źķźżźųźķźĻż“╗╚ż├żŲźųźĒź├ź»övŽ®żõŪ█└■ż“ź░źķźšźŻź½źļż╦ķWżŁĪóź½ź╣ź┐ź▐źżź║żĘż┐żżźóźļź┤źĻź║źÓżŽCĖ└ĖņżŪź│Ī╝ź╔▓ĮżŪżŁżļżĶż”ż╦ż╩ż├żŲżżżļĪŻ
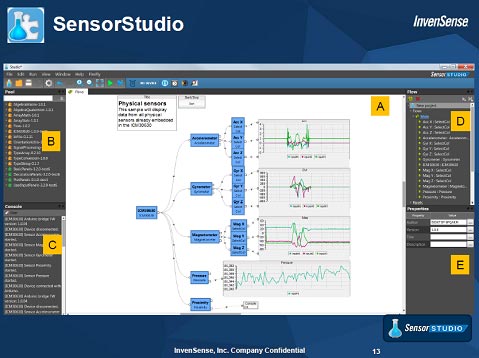
┐▐2ĪĪź╗ź¾źĄ┐«ęÄż“▓“Ų╔ż╣żļźĮźšź╚ź”ź©źóĪóźóźļź┤źĻź║źÓ│½╚»ż╬ź─Ī╝źļSensorStudioĪĪĮąųZĪ¦InvenSense
ż│ż╬ź─Ī╝źļżŪ║Ņ└«żĘż┐źóźļź┤źĻź║źÓżõźĮźšź╚ź”ź©źóżŽĪóź╗ź¾źĄźŽźųź┴ź├źūSoCż╦ŠŲżŁ¤²ż▒żļż│ż╚ż¼żŪżŁżļĪŻŲ▒╝꿎ź╗ź¾źĄźŽźųź┴ź├źūFireFlyżŌ└▀╝ŖżĘżŲż¬żĻĪóżĮż╬×æēäć@ICM-30630ż╬źóĪ╝źŁźŲź»ź┴źŃżŽĪóź│ź¾ź╚źĒĪ╝źķż╚żĘżŲARM Cortex-M0ż“ź│źóż╦Īóźóźļź┤źĻź║źÓ▒ķōQżŽDMPż╚Ō}żų└ņ├ōż╬źĒźĖź├ź»ź│źóż“ŠW├ōż╣żļĪŻFFTĪ╩╣ŌÅ]źšĪ╝źĻź©╩č┤╣Ī╦ż╩ż╔ż╬źóźļź┤źĻź║źÓźóź»ź╗źķźņĪ╝ź┐övŽ®ż╚ż╩ż├żŲżżżļĪŻż│ż╬×æēäżŪżŽżĶż»╗╚ż’żņżļ▓├Å]┼┘ż╚źĖźŃźżźĒż╬┐«ęÄĮĶ═²övŽ®ż“ĮĖ└čżĘżŲżżżļż¼ĪóżĮżņ░╩│░ż╬ź╗ź¾źĄżŽI2Cż“╗╚ż├żŲ╝{▓├żŪżŁżļĪŻ
║“ŃQż╬ż│ż╬▓±Ą─żŪżŽĪóRobert Boschż¼ź╗ź¾źĄźŽźųż“│½╚»żĘżŲżżżļż│ż╚ż“Įęż┘ż┐ż¼(╗▓╣═½@╬┴1)Īó║ŻŃQżŽżĮżņż╦żŽ┐©żņż╩ż½ż├ż┐ĪŻ
ź╗ź¾źĄżĮż╬żŌż╬żŌ┐ʿʿ»ż╩żĻż─ż─żóżļĪŻMEMSż╬ØŖ─╣żŽ▓┐ż╚żżż├żŲżŌ«ĆŠ«Ę┐żŪżóżļĪŻMEMSźŪźąźżź╣ż╬ź╚ź├źūźßĪ╝ź½Ī╝(╗▓╣═½@╬┴2)żŪżóżļBoschżŽĪóź©ź¾źĖź¾öUĖµ├ōż╬ź▐ź╣źšźĒĪ╝ź│ź¾ź╚źĒĪ╝źķ├ōż╬ź╗ź¾źĄżŌMEMSżŪ│½╚»żĘżŲżżżļż╚Įęż┘ż┐ĪŻżĄżķż╦źšźķź¾ź╣ż╬CEA-LetiżŽĪó┤─ČŁź╗ź¾źĄż╚Ō}żųź¼ź╣ź╗ź¾źĄż╚Īóź¼ź╣ź»źĒź▐ź╚ź»źķźšźŻż╦MEMSż“▒■├ōżĘż┐ź╗ź¾źĄż╦ż─żżżŲĮęż┘ż┐ĪŻź¼ź╣ź╗ź¾źĄżŽĪóIRź╣ź┌ź»ź╚źĒź╣ź│źįĪ╝ż“ŠW├ōżĘż┐ź¼ź╣╩¼└Ž╦ĪżŪżóżĻĪóź¼ź╣ż╬Ą█ŠÆż“ŠW├ōż╣żļżŌż╬żŪżŽż╩żżĪŻ¾HāS─╣źņĪ╝źČĪ╝ż╬▐k¹|żŪżóżļQCLĪ╩Quantum Cascade LaserĪ╦ż“ź¼ź╣ż╦Š╚╝ożĘĪóĖ„-▓╗āS╩č┤╣ż“╣įżżĪóMEMSź▐źżź»żŪ▓╗ż“ĖĪĮąż╣żļż╚żżż”╗┼┴╚ż▀ż└ĪŻż▐ż┐ĪóźĘźĻź│ź¾ż╦║┘─╣żż╣┬ż“╦┘żĻĪóżĮżņż“MEMSź▐źżź»źĒ╬«Ž®ż╚żĘżŲŠW├ōż╣żļź¼ź╣ź»źĒź▐ź╚ź░źķźšźŻż╬╩¼└Ž▀_żŌ╗Ņ║ŅżĘżŲżżżļ(┐▐3)ĪŻź¼ź╣ż╬─_żĄż╬░Ńżżż╦żĶż├żŲ╬«Ž®ż“╬«żņżļÅ]┼┘ż¼░Ńż”ż│ż╚ż“ŠW├ōżĘżŲź¼ź╣ż“╩¼└Žż╣żļź─Ī╝źļżŪżóżļĪŻ

┐▐3ĪĪLetiż¼╗Ņ║ŅżĘż┐MEMSź¼ź╣ź»źĒź▐ź╚ź░źķźšźŻĪĪĮąųZĪ¦CEA-Leti
ź»źļź▐├ōż╬ź╗ź¾źĄż╚żĘżŲĪó╝■░Žż╬رöüż╚ż╬š{▀`ż“▒RżļLIDARĪ╩Light Detection and RangingżóżļżżżŽLaser Imaging Detection and RangingĪ╦źĘź╣źŲźÓż¼ż╣żŪż╦ź▌źĻź┤ź¾ź▀źķĪ╝öĄ╝░żŪź»źļź▐ż╦┼ļ║▄żĄżņżŲżżżļĪŻź░Ī╝ź░źļź½Ī╝ż╬ź╚ź├źūźļĪ╝źšż╦┼ļ║▄żĄżņżŲżżżļäóÅøż¼żĮżņż└ĪŻż│ż╬ź▌źĻź┤ź¾ź▀źķĪ╝ż“MEMSź╣źŁźŃź╩Ī╝ż╦┬Õż©żŲŠ«Ę┐▓Įż“┐▐żĒż”ż╚żżż”╗Ņż▀ż¼żóżļĪŻźŪź¾źĮĪ╝żŽMEMSż╬LIDARż“ż│żņż½żķż╬ź╗ź¾źĄż╚żĘżŲĖ½żŲż¬żĻĪóBoschżŽźŌźąźżźļĄĪ▀_ż╦żŌźĖź¦ź╣ź┴źŃĪ╝Ū¦╝▒ż╚żĘżŲ╗╚ż©żļż╚Įęż┘ż┐ĪŻ
║ŪĮ¬Ų³║ŪĖÕż╬źčź═źļźŪźŻź╣ź½ź├źĘźńź¾żŪżŽĪóźšźĪźųźņź╣ż╬InvenSenseż¼Įj│žż╚ż╬│½╚»ż“äė─┤żĘż┐ż╬ż╦×┤żĘżŲĪóIDMĪ╩Äņ─Š┼²╣ńźßĪ╝ź½Ī╝Ī╦ż╬BoschżŽä▌╣±╝ęŲŌźĘźĻź│ź¾źąźņĪ╝ż╬źčźĒźóźļź╚ż╚źĘź¾ź¼ź▌Ī╝źļż╦żóżļ├µ▒¹Ė”ē|ĮĻż“ŠW├ōżĘżŲ│½╚»ż“┐╩żßĪó┬Š╝ężõ┬ŠČ╚─cż╚ż╬ź│źķź▄źņĪ╝źĘźńź¾żŽż█ż╚ż¾ż╔żĘż╩żżĪóż╚Įęż┘ż┐ż│ż╚ż¼×┤Š╚┼¬żŪżóż├ż┐ĪŻBoschżŽź»źķź”ź╔ź│ź¾źįźÕĪ╝ź┐ż╬ź¬źšźŻź╣ż“źĘźĻź│ź¾źąźņĪ╝ż╦ÅøżŁĪóź│źķź▄żĶżĻżŌ╝ęŲŌżŪŲ╚śO│½╚»ż╣żļż│ż╚ż“═ź└ĶżĘżŲżżżļĪŻż┐ż└żĘĪóBoschż╬żĶż”ż╩MEMS║ŪĮjŠ}ż╬IDMżŽżÓżĘżĒ╬Ń│░┼¬ż└żĒż”ĪŻź╗ź¾źĄźŽźųż╬źóźļź┤źĻź║źÓ│½╚»ż╬ź│źķź▄żŽØ▓╩¼żóżĻż”żļż│ż╚żŪĪóż▐ż┐║YØŹ▓Įż╣żļŠņ╣ńż╦żŌź│źķź▄ż¼ØŁ═ūż└żĒż”ż╚ĪóMEMS & Sensors Industry Group▓±─╣ż╬Karen LightmanĢ■żŽĮęż┘żŲżżżļĪŻ
╗▓╣═½@╬┴
1. Boschż╬CMOSź╗ź¾źĄźŽźųĪóśO╝ę└▀╝Ŗż╦żĶżĻIoTĒö┴Ķ╬üż“æųż▓żļ (2015/05/01)
2. 2015ŃQż╬MEMSźķź¾źŁź¾ź░ĪóRF-MEMSżŪAvagoż¼ŠåäP (2016/04/07)