╣®Č╚├ōźßź┐źąĪ╝ź╣żŪ─¾Ę╚żĘż┐Siemensż╚NvidiaĪóŲ³ŠÅż╬ź»źļź▐║ŅżĻż╦īÖż½ż╣
Ų╚Siemens╝ęż╚ä▌(sh©¼)Nvidia╝ęż¼╣®Č╚├ōźßź┐źąĪ╝ź╣ż╬╝┬ĖĮżŪ6ĘŅż╦─¾Ę╚Īóż│ż╬ż█ż╔Ų³ŠÅśOŲ░┘Zż╬┼┼ĄżśOŲ░┘ZĪųźóźĻźóĪūż╬│½╚»ż╦īÖż½ż╣ż│ż╚żŪ╣ń┴Tż╦├ŻżĘż┐ĪŻ╣®Č╚├ōźßź┐źąĪ╝ź╣żŽĪóźĘź▀źÕźņĪ╝źĘźńź¾żŪĖĮ╝┬ż╬└ż─cż╚µ£ż»Ų▒żĖżŌż╬ż“║ŅżĻĮąż╣źŪźĖź┐źļź─źżź¾ż“żĶżĻźėźĖźÕźóźļż╦ż╣żļČ\ĮčĪŻź▓Ī╝źÓżõźŲźņź│ź¾źšźĪźņź¾ź╣żŪż╬źßź┐źąĪ╝ź╣ż╚żŽµ£ż»░Ńż”ĪŻ×æēä│½╚»┤³┤ųż╬ø](m©”i)Į╠ż╦░ę╬üż“╚»Ä¦ż╣żļĪŻ

┐▐1ĪĪSiemens╝ęŲD─∙╠“Ę¾Digital Industriesŗ╠ńCEOż╬Cedrik NeikeĢ■(hu©¼)
SiemensżŽźŽĪ╝ź╔ź”ź©źóż╬ź¬Ī╝ź╚źßĪ╝źĘźńź¾ż╚Īó╣®Č╚├ōźĮźšź╚ź”ź©źóż╬2Įj(lu©░)Ą£Č╚ŗ╠ńż½żķż╩żļ┤ļČ╚żŪĪó─¾Ę╚żĘż┐ż╬żŽźĮźšź╚ź”ź©źóĄ£Č╚ż“Š}²Xż▒żļSiemens Digital Industries Softwareŗ╠ńĪŻSiemensżŽĪóEDAż╬Mentor Graphicsż“āA╝²żĘĪóźŌź╬ż┼ż»żĻż╬źĮźšź╚ź”ź©źóĪ╩CADĪóCAEĪóPLMż╩ż╔Ī╦ż╦┼┼╗ęövŽ®ż╬EDAŗ╠ńżŌŠ}ż╦Ų■żņż┐ĪŻ║ŪŖZż╬źŌź╬ż┼ż»żĻżŽż½ż─żŲż╬║óż╚żŽ░ŃżżĪóĄĪ│Żż╚ź©źņź»ź╚źĒź╦ź»ź╣ĪóITż¼┴Ē╣ń┼¬ż╦═╗╣ńż╣żļżĶż”ż╦ż╩ż├żŲżŁżŲżżżļż┐żßĪó┼┼╗ęövŽ®ż╬EDAżŌżĘż├ż½żĻź½źąĪ╝ż╣żļĪŻ
żĘż½żĘĪóźĮźšź╚ź”ź©źóż└ż▒żŪżŽĪóźŌźŪźļżõźóźļź┤źĻź║źÓĪóAIźŌźŪźļż╬æä╠Žż╦żĶż├żŲżŽź│ź¾źįźÕĪ╝ź┐╝ŖōQż¼┐¶ź½ĘŅż½ż½żļż│ż╚żŌżóżļĪŻż│ż╬ż┐żßż╔ż¾ż╩ż╦═źżņż┐źĮźšź╚ź”ź©źóżŪżóż├żŲżŌ──æžż╩ź│ź¾źįźÕĪ╝ź┐żŽ╗╚ż©ż╩żżĪŻ▒ķōQż╩żķżõżŽżĻ┐¶├═╝ŖōQż╬įu(p©¬ng)┴Tż╩Nvidiaż╬GPUż¼źūźĒź░źķźÓ▓─ē”żŪĪóżĘż½żŌ╣ŌÅ]ż╦ĮĶ═²żŪżŁżļĪŻ
▐köĄ(sh©┤)ĪóNvidiażŽĪóźņźżź╚źņĪ╝źĘź¾ź░Ī╩Ray TracingĪ╦Č\Įčż╦żĶżĻĪó└^┐┐ż½│©Ī╩ź░źķźšźŻź├ź»ź╣Ī╦ż½ČĶ╩╠ż╬ż─ż½ż╩żżż█ż╔æz£½żŪĖĮ╝┬ż╦ŖZżż▓Ķ楿“ŠÅż▀Įąż╗żļżĶż”ż╦ż╩ż├ż┐ĪŻżĮżņżŌźĻźóźļź┐źżźÓżŪźņźżź╚źņĪ╝źĘź¾ź░ĮĶ═²żŪżŁżļČ\Įčż“3ŃQØiż╦│½╚»żĘż┐ĪŻźņźżź╚źņĪ╝źĘź¾ź░żŽ└╬ż½żķżóżļČ\ĮčżŪĪó└^┐┐╩┬ż▀ż╬æz£½ż╩▓Ķ楿“║ŅżĻĮąż╣ż┐żßĪó×┤ō■(j©┤)رż╦┼÷ż┐żļĖ„ż╬Ė„Ž®ż“╩╔żõرöüż½żķż╬╚┐╝o(j©¼)µ£żŲż“╣═╬ĖżĘżŲ▒ķōQż╣żļĪŻż│ż╬ż┐żß5Ī┴6ŃQ░╩æųżŌØiż╬ź│ź¾źįźÕĪ╝ź┐żŪżŽ╝ŖōQż╦┐¶ĮĄ┤ųż½ż½ż├żŲżżż┐ĪŻżĮżņż“Nvidiaż¼źĻźóźļź┐źżźÓżŪ╝ŖōQżŪżŁżļżĶż”ż╦żĘż┐ĪŻSiemensżŽĪó3ŃQØiż╦Nvidiaż¼źĻźóźļź┐źżźÓźņźżź╚źņĪ╝źĘź¾ź░ż“│½╚»żĘż┐ż│ż╚żŽē¶(m©©ng)żķż╩ż½ż├ż┐żĶż”żŪĪó─¾Ę╚żĘżŲż½żķźņźżź╚źņĪ╝źĘź¾ź░żŪźßź┐źąĪ╝ź╣ż╬└ż─cż“╔ĮĖĮżŪżŁżļż│ż╚ż“ē¶(m©©ng)ż├ż┐Ī╩┐▐2Ī╦ĪŻ
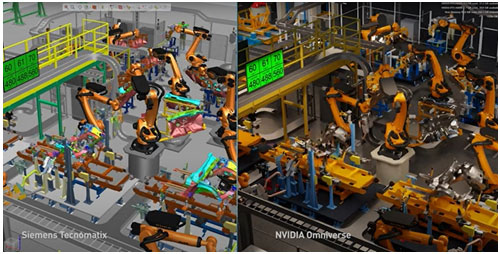
┐▐2ĪĪSiemensż╬źŪźĖź┐źļź─źżź¾źĘź▀źÕźņĪ╝źĘźńź¾Ī╩║ĖĪ╦ż╚Nvidiaż╬OmniverseĪ╩īÜĪ╦ĪĪĮąųZĪ¦SiemensĪóNvidia
śOŲ░┘Zż╬└▀╝ŖŪvżŽĪó╬«└■Ę┐ż╬Ę┴żŪȧĄż°B(ni©Żo)Ń^ż“▓╝ż▓ż╩ż¼żķĪóźŪźČźżź¾└ŁżŌ║╬żĻŲ■żņżļĪŻżĄżķż╦Ą’Į╗└Łżõ├@▓╗ż╩ż╔żŌ╣═╬Ėż╦Ų■żņż┐ź»źļź▐ż╬│░ćĶż“źŪźČźżź¾ż╣żļĪŻż╔ż╬żĶż”ż╩Ę┴ż╦ż╩żļż╬ż½Īóź©ź¾źĖź╦źóż└ż▒żŪżŽż╩ż»ĪóĘą▒─┐žżõ▒─Č╚Īóź▐Ī╝ź▒źŲźŻź¾ź░ĪóŠ”ēä┤ļ▓ĶĪ󿥿ķż╦żŽķL(zh©Żng)│░╣®Šņż╬ź©ź¾źĖź╦źóż╩ż╔żŌ▓├ż’ż├żŲźŪźČźżź¾ż“Ą─ébżŪżŁżļŠņż¼═▀żĘżżĪŻż│ż╬Šņż“║ŲĖĮż╣żļż╬ż¼╣®Č╚├ōźßź┐źąĪ╝ź╣żŪżóżļĪŻĖĮ╝┬┼¬ż╩źŪźČźżź¾żõĘ┴ż╦╔„ż“┼÷żŲż┐żĻĪó┘Zöüż╬ča(b©│)┼┘╩¼╔█ż╩ż╔ż“ź┴ź¦ź├ź»żĘż┐żĻż╣żļż╩ż╔Īóż▀ż¾ż╩ż¼╝┬┘xż╬Š╩¾ż“źĻźóźļź┐źżźÓżŪČ”Ń~żŪżŁżļĪŻż│ż╬ż┐żßĪó▌xŠņż╦Įąż╣ż▐żŪż╬│½╚»┤³┤ųżŪżóżļT2MĪ╩Time to marketĪ╦ż“┐¶ź½ĘŅżŌø](m©”i)Į╠żŪżŁżļĪŻ
źßź┐źąĪ╝ź╣żŽź»źļź▐ż╬└▀╝Ŗż└ż▒żŪżŽż╩ż»ĪóżĮżņż“ĖĮŠņż╦╬«ż╣Ö┌ŠÅ╣®ŠņżĮż╬żŌż╬żŌźŪźĖź┐źļź─źżź¾żŪźĘź▀źÕźņĪ╝źĘźńź¾żĘ(┐▐2)ĪóźĒź▄ź├ź╚ż╬Ų░║Ņ╗■┤ųż“äh▓┴żĘż┐żĻĪó║ŅČ╚źšźĒĪ╝ż╬ź▄ź╚źļź═ź├ź»ż“Ė½ĮążĘż┐żĻżŪżŁżļĪŻż│żņż╦żĶżĻĪó║ŪżŌź╣źļĪ╝źūź├ź╚ż╬╣ŌżżÖ┌ŠÅöĄ(sh©┤)╝░ż“Ė½Įąż╣ż│ż╚ż¼żŪżŁżļĪŻ
źßź┐źąĪ╝ź╣ż“╝┬ĖĮż╣żļż┐żßż╦ĪóSiemensżŽ3D-CADż¼źĘź▀źÕźņĪ╝źĘźńź¾ĪóPLMĪ╩×æēäźķźżźšźĄźżź»źļ┤╔═²Ī©▐k¹|ż╬ź│ź¾źŲź¾ź─┤╔═²źĘź╣źŲźÓż╬źĮźšź╚Ī╦ż╩ż╔Īó┴Ē╣ń┼¬ż╩źŪźĖź┐źļźūźķź├ź╚źšź®Ī╝źÓżŪżóżļĪóSiemens Xceleratorż╚ĪóNvidiaż╬źŽĪ╝ź╔ź”ź©źóżŽżŌż┴żĒż¾ż└ż¼Īó3DźŪźČźżź¾ż╚źĻźóźļź┐źżźÓźĘź▀źÕźņĪ╝źĘźńź¾ż“╣įż”ż┐żßż╬źĮźšź╚ź”ź©źóźūźķź├ź╚źšź®Ī╝źÓż╬Omniverseż“ż─ż╩ż▓żļżĶż”ż╦żĘżŲżżżļĪŻ
XceleratorżŽĪ󿬿Ōż┴żŃż╬Īųźņź┤Īūż╬żĶż”ż╦CADżõźĘź▀źÕźņĪ╝źĘźńź¾ĪóPLMż╩ż╔ż╬źĮźšź╚ź”ź©źóż“żżżĒżżżĒż╚┴╚ż▀╣ńż’ż╗żķżņżļżĶż”ż╦║ŅżķżņżŲżżżļż╚żżż”ĪŻIoTż╬źŪĪ╝ź┐╝²ĮĖĪ”┤╔═²Ī”▓“└Žż╩ż╔ż╬źūźķź├ź╚źšź®Ī╝źÓżŪżóżļMindSphereżõĄņMentor Graphics×æēäĪ󟻟ķź”ź╔źĮźĻźÕĪ╝źĘźńź¾ż╩ż╔ż“┴╚ż▀╣ńż’ż╗żŲĪó╠ż═Ķż╬×æēäżõÖ┌ŠÅöüöU(ku©░)ż“▓─£å▓Įż╣żļĪŻNvidiaż╬Omniverseż╚┴╚ż▀╣ńż’ż╗żļż│ż╚żŪĪóżĶżĻĖĮ╝┬┼¬ż╩×æēäŠ╩¾ż“Č”Ń~żŪżŁżļżĶż”ż╦ż╩żļĪŻ
╬Š╝ęż╬źĮźĻźÕĪ╝źĘźńź¾ż“Ų³ŠÅśOŲ░┘Zż╬Ų╩“v╣®Šņż╦Ų│Ų■żĘĪóŲ³ŠÅżŽ┐ʿʿż┼┼ĄżśOŲ░┘Zż╬Ö┌ŠÅźķźżź¾ż“źŪźĖź┐źļ▓ĮżĘżŲżżż»ĪŻ║ŅČ╚┤─ČŁż╬▓■║¤ż└ż▒żŪżŽż╩ż»Īóź╝źĒź©ź▀ź├źĘźńź¾ż╬Ö┌ŠÅöüöU(ku©░)żŌ╝┬ĖĮżĘżŲżżż»ż╚żĘżŲżżżļĪŻ